Научение у животных с точки зрения кибернетики
Научение у животных с точки зрения кибернетики
Что такое кибернетика? Исходя из наших нужд ее следует определить как учение о функциональных саморегулирующихся системах. Поскольку определение всегда абстрактно, покажем на простом примере, что имеется в виду.
Предположим, что наша рабочая или жилая комната отапливается газовой печью. При температуре 21 °C мы чувствуем себя нормально. Регуляторы в системе отопления позволяют нам, когда становится слишком жарко, уменьшать, а при снижении температуры увеличивать подачу газа. Если подачу газа приходится регулировать во время напряженного труда, то это мешает работе.
Между тем технически несложно соединить подачу газа с термометром. Термоизмерительный прибор соединяют с газопроводом таким образом, что при повышении температуры подача топлива уменьшается, а при понижении увеличивается. Так автоматизируют отопление помещений. Газ дает тепло, тепло действует на газ. Поэтому мы говорим об автоматизированной системе регулирования. В нашем очень простом примере эта система позволяет человеку не тратить никаких усилий на переключение отопительного устройства. На крупном промышленном предприятии, где приходится регулировать многое — температуру парогенераторов, скорость работы станков, давление в котлах и т. д., — может быть получена очень большая экономия рабочей силы.
Но вернемся к нашему примеру. Поскольку температура в помещении воспринимается каждым из нас индивидуально, создают такие регулирующие устройства, которые позволяют устанавливать желательную температуру. Кто любит сидеть в теплой комнате, установит регулятор на 23 °C, кто предпочитает более низкую температуру, поставит на 19 °C, а то и ниже. Автоматическое устройство будет поддерживать заданную температуру.
Что общего между работой автоматической системы и процессом обучения животных?
В ответ на этот вопрос разберем еще один простой пример. Поднимая гантель весом пять килограммов, новичок в тяжелой атлетике поначалу слишком слабо напрягает мышцы. Но затем он прикладывает большие усилия и поднимает гантель. При повторении упражнения он уже сразу правильно напрягает мышцы.
Как это оказалось возможным?
В начале каждого движения из мозга по нервам поступает указание мышцам — в нашем примере оно касается степени их напряжения. Удалось или не удалось выполнение движения, мозг узнает через другие нервные каналы. Это сообщение является принципиально важным в кибернетике обратным сообщением (или обратной связью). Само собой разумеется, что оно передается не словами, оно закодировано (вроде телеграммы, передающейся при помощи азбуки Морзе), то есть состоит из определенной последовательности отдельных импульсов. В рассматриваемом нами примере первое обратное сообщение означает, что напряжение мышц недостаточно. Сразу же следует указание повысить напряжение. Теперь, когда оно стало достаточным, в мозг поступает соответствующее обратное сообщение. Там оно фиксируется, иначе говоря, необходимое для поднятия гантели напряжение запоминается. Это напряжение является расчетной величиной, на которую устанавливается система регулирования мозг — мышца — мозг. В следующий раз, поднимая гантель весом пять килограммов, человек уже без какого-либо раздумья применяет наиболее пригодное для этого усилие мышц. Две части — мозг и мышцы — образуют саморегулирующуюся систему. Безусловно, она зависит и от других процессов, происходящих в теле. Скорее всего она является подсистемой в очень большой и сложной общей системе.
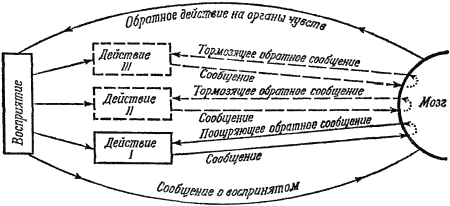
Рис. 31. Кибернетическая блок-схема для пояснения сообщения и обратного сообщения. (Мозг получает сообщение об «успехе» только при действии I)
Наверняка многим хорошо известен цирковой номер, позволяющий показать отрегулированное на расчетную величину отношение между мозгом и мышцами. Кому-нибудь предлагают поднять гантель, сделанную из картона и по своему цвету, форме и надписи «5 кг» разительно напоминающую металлическую гантель того же веса. На самом деле пустая картонная гантель весит всего несколько граммов. Человек видит ее и принимает за настоящую. Он наклоняется к муляжу, намереваясь поднять пятикилограммовую гантель, и его мышцы получают соответствующее сообщение: следует применить такое-то напряжение. Но оно, естественно, намного превышает действительно необходимое усилие — рука вместе с муляжом подлетает вверх, что поражает и действующее лицо и публику и вызывает смех.
Связанным с регулированием процессам, механизмам, аппаратам, мышцам или нервам дают в кибернетике как можно более общие обозначения и включают в схему. То, что принимается как действующее, например измерительный прибор, восприятие, поведение или процесс в мозге, заключают в рамку и называют блоком. Система, составленная таким образом, называется блок-схемой.
Попробуем при помощи рис. 31 детальнее познакомиться с блок-схемой. Восприятие животного, указанное на рисунке слева, может относиться к чему угодно: мешающей решетке, ручке двери, крышке ящика. Воспринятое через зрительный канал нервной системы сообщается мозгу. Из него поступает обратное сообщение в орган восприятия, обычно глаз. Передача сигналов от воспринимающего органа к мозгу и обратно показана на рисунке внешней кривой. Это делает содержание восприятия интересным: либо привлекательным, либо сулящим опасность. Нередко только после обратного сообщения на окружающем животное фоне что-то начинает проясняться; по-видимому, это можно отнести к защелке, которой занимался енот.
Но в этой схеме должны быть учтены столь часто упоминавшиеся действия животного. На нашем рисунке для простоты показаны только три из них: одно успешное действие I (сплошная линия) и два безуспешных (II и III, штриховая линия). Род выполненного движения и его результат также сообщаются мозгу. Идущее оттуда обратное сообщение к органам движения (мышцам) при выгодном для животного поведении действует поощрительно или благоприятно, при напрасном — сдерживающе, тормозяще. Таким образом, отношение между моторикой (органами движения), с одной стороны, и мозгом — с другой, можно рассматривать как контур регулирования.
Ну а теперь вернемся к процессу научения животных и попробуем объяснить его с помощью теории регулирования. Итак, перед нами два различных контура регулирования: во-первых, система орган чувств — мозг — орган чувств и, во-вторых, система моторика — мозг — моторика. Обе системы находятся в диалектической взаимосвязи. Кибернетический подход подтверждает вывод, сделанный еще Павловым при изучении условных рефлексов. Сообразно с этим имеются два и только два основных результата высшей нервной деятельности: один — возбуждающее действие, которое в нашей блок-схеме для упрощения и облегчения понимания названо поощряющим или благоприятным; другой — торможение, отчетливо проявляющееся при уменьшении в ходе эксперимента числа напрасных действии. В этой связи еще раз хочется сказать: ни при каких обстоятельствах нельзя считать, что труды Павлова имеют только историческое значение и не представляют сегодня научного интереса. Скорее верно то, что современные научные исследования ведутся на прочном фундаменте старых достижений и обогащают их новыми.
Иному любителю животных кибернетические рассуждения покажутся трудными, слишком абстрактными и не имеющими прямого отношения к практике, во всяком случае к дрессировке собак. Между тем эту связь установить совсем несложно. Известно, что одни виды поведения животных затормозить легче, другие — сложнее. Блок-схема в этом случае укажет необходимую форму тренировочных упражнений. Нам уже больше не придется зависеть от подчас весьма различающихся оценок мнимых или настоящих экспертов, так как все точные факты поддаются математической обработке.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Органы зрения
Органы зрения Изменения век, слезных путей и роговицы Как известно, роговица — часть внешней оболочки глаза, соприкасающаяся с окружающим воздухом. Роговица состоит из живых, практически прозрачных эпителиальных клеток, и поэтому должна постоянно смачиваться
Горячие точки
Горячие точки Поэтому приземлим наши фантазии и опустимся глубоко на дно. Там, в океанических рифтовых долинах, раскаленная лава (с температурой около 1200 °C) поднимается из земных недр к поверхности. Ей навстречу до 15-километровой глубины по трещинам сочится морская вода
2.12. Дифференциальная чувствительность зрения
2.12. Дифференциальная чувствительность зрения Если на освещённую поверхность с яркостью I падает добавочное освещение dI, то, согласно закону Вебера, человек заметит разницу в освещённости только если dI/I = К, где К – константа, равная 0,01–0,015. Величину dI/I называют
Интимность с точки зрения полов
Интимность с точки зрения полов Все ж я заметил, что стрела вонзилась В молочно-белый западный цветок, Теперь багровый от любовной раны; У дев он прозван «праздною любовью». Ты мне его достань; его ты знаешь. Чьих сонных вежд коснется сок его, Тот возгорится страстью к
Глава X Орган зрения
Глава X Орган зрения Краткое описание Утверждение «глаза — зеркало души» одинаково справедливо как для человека, так и для любого живого существа. Взглянув в глаза кошки или собаки, мы сразу же интуитивно понимаем состояние их психоэмоциональной сферы и чувствуем, какие
НАУЧЕНИЕ НА ОСНОВЕ ОБРАЗОВАНИЯ ИНСТРУМЕНТАЛЬНЫХ УСЛОВНЫХ РЕФЛЕКСОВ (ОПЕРАНТНОЕ НАУЧЕНИЕ)
НАУЧЕНИЕ НА ОСНОВЕ ОБРАЗОВАНИЯ ИНСТРУМЕНТАЛЬНЫХ УСЛОВНЫХ РЕФЛЕКСОВ (ОПЕРАНТНОЕ НАУЧЕНИЕ) Отцом инструментальной формы научения считается Э. Торндайк, который еще в конце прошлого века назвал такую форму научения обучением «методом проб, ошибок и случайного успеха».
Сравнение коммуникационных систем человека и животных с точки зрения лингвистики
Сравнение коммуникационных систем человека и животных с точки зрения лингвистики Сравнительный анализ коммуникационных систем некоторых животных и человека с позиции лингвистики был проведен Р. Футсом и Ч. Хоккетом. Он строился на основе семи ключевых свойств языка,
МОНОГАМИЯ — НЕ ИДЕАЛ С ТОЧКИ ЗРЕНИЯ ЕСТЕСТВЕННОГО ОТБОРА
МОНОГАМИЯ — НЕ ИДЕАЛ С ТОЧКИ ЗРЕНИЯ ЕСТЕСТВЕННОГО ОТБОРА Иная ситуация у тех видов, где самец заботится о самке и о потомстве. Здесь программа заполучения самками элитных генов сталкивается с другой программой: обеспечить себе и потомству самца на весь период
Глава 6 Соединяем точки
Глава 6 Соединяем точки 200 миллионов летПятьсот тридцать миллионов лет назад Земля еще выглядела непривычно для нас. Даже дышать тогда было так же трудно, как сейчас взбираться на Эверест без кислородной маски. Самым подходящим для жизни местом была вода. В океане
Сравнение коммуникационных систем человека и животных с точки зрения лингвистики
Сравнение коммуникационных систем человека и животных с точки зрения лингвистики Сравнительный анализ коммуникационных систем некоторых животных и человека с позиции лингвистики был проведен Р. Футсом и Ч. Хоккетом. Он строился на основе семи ключевых свойств языка,
В чем состоит значение нейтрино с точки зрения астрофизики?
В чем состоит значение нейтрино с точки зрения астрофизики? Нейтрино – это элементарные частицы, не имеющие электрического заряда. В 1931 году швейцарский физик Вольфганг Паули высказал предположение об их существовании, а экспериментально оно было доказано в 1956 году.
Что такое эклиптика и что представляют собой ее четыре главные точки?
Что такое эклиптика и что представляют собой ее четыре главные точки? Эклиптика (от греч. ekleipsis – затмение) – это большой круг небесной сферы, по которому происходит видимое годичное движение Солнца, точнее – его центра. Так как это движение отражает действительное
Моногамия – не идеал с точки зрения естественного отбора
Моногамия – не идеал с точки зрения естественного отбора Иная ситуация у видов с заботой самца о самке и потомстве. Программа заполучения самками элитных генов сталкивается с другой программой — обеспечить себе и потомству самца на весь период размножения. Тут уж при
Что такое обаяние с этологической точки зрения?
Что такое обаяние с этологической точки зрения? Хотя феномен обаяния (труднообъяснимой притягательности человека) не исчерпывается этологическими причинами, но имеет прежде всего инстинктивные корни. Обаятельного человека этологически можно охарактеризовать как