Познавательные процессы при формировании навыков
Познавательные процессы при формировании навыков
Еще в начале нашего века сложилось мнение, что образование навыков — как в отношении ориентации среди элементов среды, так в отношении формирования новых сочетаний движений — происходит путем «проб и ошибок». К этому выводу пришел в результате своих исследований ряд выдающихся ученых — Г. Спенсер, К. Ллойд-Морган, Г. Дженнингс, и, прежде всего Э. Торндайк. Согласно концепции «проб и ошибок», животное запоминает то, что случайно привело к успеху, все остальное постепенно отсеивается. Иными словами, в результате «проб и ошибок» совершается отбор и закрепление случайно произведенных удачных движений, что и приводит в конце концов путем многократных повторений к формированию двигательного навыка. Конечно, при этом отсутствует какое бы то ни было понимание связей и отношений между компонентами научения. Существенным здесь является представление, что «пробы и ошибки» совершаются беспорядочно.
Однако, как уже было доказано, образование навыков является значительно более сложным процессом и определяется активным отношением животного к воздействующим на него факторам среды. Еще в 20-е годы Э. Толмен, В. П. Протопопов и другие возражали против представления о хаотичности движений, производимых животными при решении задач, и показали, что эти движения формируются в процессе активной ориентировочной деятельности. Пои этом животное анализирует ситуацию и избирает то направление движений, которое соответствует положению «цели». В результате движения животного становятся все более адекватными ситуации, в которой дана задача. Таким образом, на место случайного возникновения движений ставится, как решающий фактор, активный двигательный анализ ситуации.
Этот взгляд получил подтверждение в ряде экспериментальных исследований. Так, американский ученый И. Ф. Дэшиелл показал, что пробные забеги крыс в тупики лабиринта вовсе не случайны, а, как правило, производятся в сторону «цели»: после первой ориентировки в лабиринте животное создает как бы общую систему направления своего передвижения; при этом крыса значительно чаще заходит в тупики, расположенные по направлению к цели, чем расположенные в обратном направлении (рис. 12). Аналогичные данные были получены К. Спенсом и В. Шипли (рис. 13).
Направленность действия при выработке навыков, возникающая в результате первоначальной активной ориентировки животного, побудила И. Кречевского выдвинуть тезис о появлении у животного своего рода «гипотез», которыми оно руководствуется при решении задач. Особенно это выявляется в тех случаях, если подопытному животному ставится заведомо неразрешимая задача, например, когда в беспорядочной последовательности закрываются и открываются проходы лабиринта (рис. 14). В этом случае у разных групп подопытных животных появляются разные, но всегда устойчивые типы поведения. По Кречевскому, животные пытаются выйти из затруднения, строя «гипотезу» и испытывая ее пригодность. В случае неудачи животное заменяет ее другой «гипотезой». Поэтому действия по одной «гипотезе» повторяются многократно, до выявления ее непригодности. Соответственна животное некоторое время ведет себя одинаковым образом независимо от меняющихся внешних условий. Так, в упомянутом лабиринте Кречевского которые крысы, например, первоначально сворачивали на всех развилках в одну и ту же сторону. Убедившись, что эта «гипотеза» не приводит к успеху, они стали постоянно сворачивать в противоположную сторону.

Рис. 12. Лабиринт Дэшиелла. Стрелка показывает вход в лабиринт, пунктирные линии обозначают дверцы, открывающиеся только в сторону выхода из лабиринта. Из 6 Т-образных тупиков наиболее часто посещался крысами тупик В, расположенный по направлению к цели (параллельно выходу). Тупики Б,Г и Е, направленные в противоположную от цели сторону, посещались в 5–11 раз реже, чем тупик В
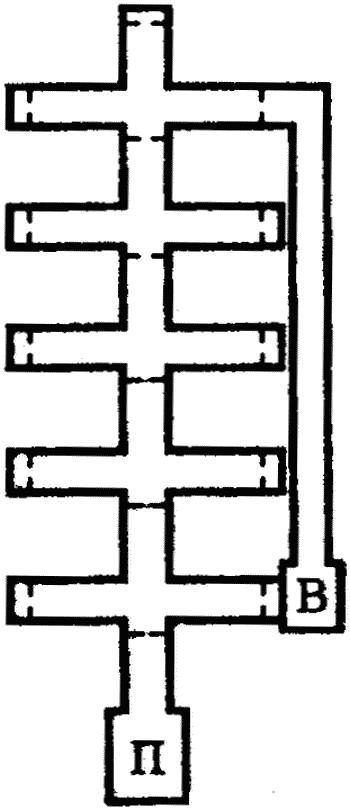
Рис. 13. Лабиринт Спенса и Шипли. П — пусковая камера; В — выход из лабиринта. Пунктирные линии обозначают непрозрачные занавесы, не дающие крысе увидеть концы коридоров. Тупики, расположенные в сторону выхода, посещались в 3–4 раза чаще, чем направленные в противоположную сторону
В других случаях крысы начинали регулярно чередовать повороты налево и направо. Таким образом, обнаруживается четкая связь между предыдущей попыткой и последующей, животное как бы стремится организовать свое поведение по одному «принципу». Кречевский считал, что этот в известней мере абстрактный «принцип» отличается систематичностью и обусловлен внутренней «настройкой» животного.

Рис. 14. Лабиринт Кречевского. П — пусковая камера. Прерывистыми линиями показаны дверцы, которыми можно закрывать проход то с левой, то с правой стороны, пунктиром — путь животного. Пояснения см. в тексте
Концепция Кречевского, безусловно, не свободна от недостатков, и сам термин «гипотеза» является крайне неудачным применительно к поведению животных. Вместе с тем большая заслуга этого ученого заключается в том, что он убедительно показал всю сложность поведения крысы в лабиринте (и других подобных ситуациях), особенно в начальном периоде решения задачи, когда решающую роль играет исследовательское поведение животного. Не менее ценным является в этой концепции то, что делается акцент на активность и инициативу животного и подчеркивается роль внутренних факторов (психического настроя животного) в процессе решения задач.
Опровергается тезис о «случайности» попыток решения задач и опытами с применением «латентного обучения». В таких опытах сравнивается скорость образования навыка у животных, которых непосредственно перед началом эксперимента помещают в лабиринт или «проблемный» ящик, с таковой у животных, которым предоставлялась возможность предварительно активно ознакомиться с установкой, побегать в ней. В последнем случае вырабатывается двигательный навык значительно быстрее.
В этой связи важно отметить, что каждая крыса, впервые попавшая в лабиринт, ведет себя иначе, особенно на первоначальной ориентировочной фазе, предшествующей решению задачи, когда пробежки совершаются еще без всякого подкрепления и служат лишь накоплению опыта. Варьирует даже модальность ведущей рецепции при первоначальном обследовании лабиринта (одни крысы руководствуются преимущественно визуальными, другие — кинестетическими стимулами и т. д.).
Крыса, просто бегая по лабиринту, познает его еще до решения задачи, связанного с получением пищевого подкрепления (или наказания) за правильную (или неправильную) ориентацию. Разумеется, индивидуальные особенности исследовательского поведения животного сказываются и в ходе самого решения задачи. Значительные индивидуальные различия поведения вообще являются характерным признаком процессов научения.
Итак, активная познавательная деятельность животного является важнейшей предпосылкой успешного формирования навыка при решении задач. В сущности, именно познавательный компонент определяет природу навыка. По Леонтьеву, важнейшим критерием навыка является выделение при решении задач особого состава или стороны деятельности, отвечающей условиям, в которых дан побуждающий деятельность животного предмет. Леонтьев обозначил этот компонент деятельности операцией. Выделение операции в двигательной активности животного и указывает на то, что мы действительно имеем дело с истинным навыком, а не с другой формой научения, поэтому Леонтьев считает навыками лишь закрепленные операции.
Выделение операции можно показать на простом опыте, проведенным А. В. Запорожцем и И. Г. Диманштейн по методу «обходного пути». В аквариум ставится поперечная перегородка из марли так, чтобы у боковой стенки оставался свободный проход. В меньшую часть аквариума в начале опыта помещается подопытная рыба, в большую, за перегородкой, — приманка (кусочки мяса). Чтобы заполучить приманку, подопытное животное должно обойти преграду (перегородку), что ему и удается после ряда безуспешных попыток найти дорогу к пище напрямик. В поисках пути к приманке животное производит локомоторные действия, в которых Леонтьев вычленяет двоякое содержание: 1) направленную деятельность, приводящую к результату и возникающую под влиянием свойства самого побуждающего деятельность предмета (запахи мяса), и 2) деятельность, связанную с воздействием преграды, т. е. с условиями, в которых дан побуждающий деятельность предмет. Именно эта деятельность и явится операцией.
После того как рыба (в описанном опыте — сомик) хорошо усвоила обходной путь, преграда была удалена, тем не менее рыба полностью повторяла прежний путь, как если бы преграда была на месте. Только постепенно путь рыбы к приманке выпрямлялся (рис. 15,а). Подобные опыты производились со сходными результатами и на крысах (рис. 15, 6).
Следовательно, отмеченные компоненты деятельности здесь выступают еще слитно; воздействие, определяющее обходное движение, еще прочно связывается с воздействием пищи, с ее запахом. Перегородка не отделяется от приманки, воздействие преграды пока еще не воспринимается как свойство другой вещи — словом, операция здесь еще не выделяется.
По поводу описанного здесь опыта с сомиком Леонтьев пишет, что деятельность животных определяется уже фактически воздействием со стороны отдельных вещей (пища, преграда), но отражение действительности остается у них отражением совокупности отдельных ее свойств.
В приведенном примере познавательный компонент, а соответственно и навык в целом находятся на еще очень низком уровне; выученная животным траектория обходного пути оказалась настолько прочно закрепленной, что лишь постепенно элиминировалась в новых условиях среды (т. е. после удаления перегородки). Это типичный пример автоматизированного навыка. Чем сложнее навык, тем больше его познавательное значение и наоборот. В навыках высшего ранга, характерных для высших позвоночных, операция играет чрезвычайно важную познавательную роль. Однако и у этих животных закрепление индивидуального опыта совершается нередко в форме примитивных навыков наподобие описанного. Уровень навыка зависит в каждом конкретном случае от определяющих факторов биологии вида и от ситуации, в которой животное встречается с той или иной более или менее сложной задачей.
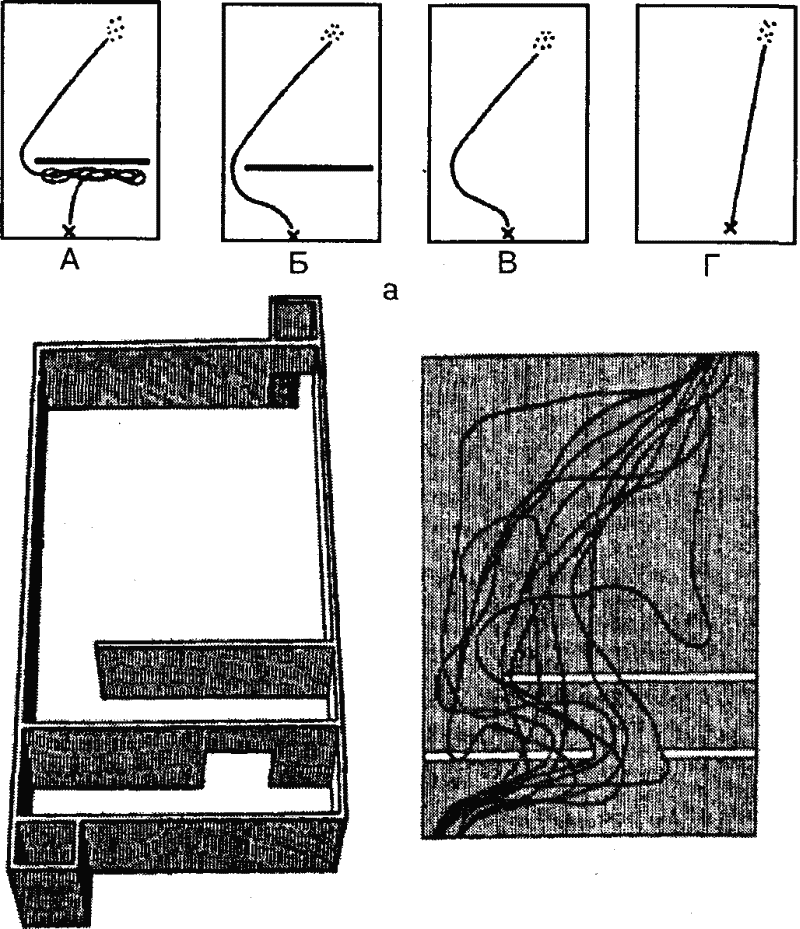
Рис. 15. Формирование обходного пути и его сохранение после удаления преград у сомика (а) и крысы (б). Пояснения см. в тексте
Говоря о структуре и динамике навыка, важно подчеркнуть, что понятие преграды не следует понимать лишь в физическом смысле, как перегородку на пути животного. Под преградой понимается любое препятствие к достижению побуждающего объекта («цели») при решении задачи. Это подчеркивал в свое время и Протопопов, который сумел экспериментально доказать, что любые двигательные навыки формируются у животных путем преодоления «преграды», что содержание навыков определяется именно характером самой преграды. Стимул же влияет, по Протопопову, на навык только динамически, определяя быстроту и прочность его закрепления.
Таким образом, преодоление преграды составляет наиболее существенный элемент формирования навыка не только при его. выработке описанным методом, но и при всех других методах, широко применяемых в зоопсихологических исследованиях. В частности, это относится к методам «лабиринта» и «проблемного ящика». Именно в способах преодоления преграды проявляется познавательная функция навыка.
Изучая познавательные аспекты формирования навыков у животных, венгерский зоопсихолог Л. Кардош также показал, что в ходе обучения в лабиринте у животного накапливается значительный запас информации. В результате уже в начале лабиринта животное «в памяти… видит дальше стен, закрывающих его поле ощущений; эти стены становятся как бы прозрачными. В памяти оно „видит“ цель и наиболее важные с точки зрения локомоции (перемещения) части пути, открытые и закрытые двери, разветвления и прочее, „видит“ точно так и там, где и как оно видело и в действительности во время обхода лабиринта».[36]
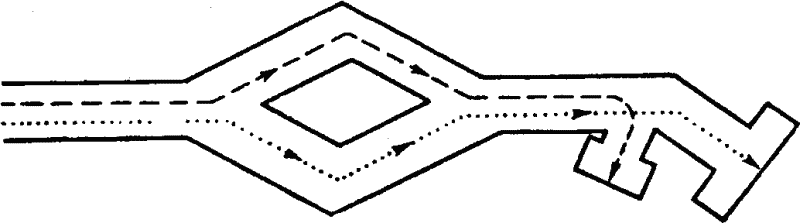
Рис. 16. Схема опыта Кардоша. Пояснения см. в тексте
Вместе с тем Кардош четко показал и границы познавательных возможностей животного в лабиринте, как и вообще при решении пространственно временных задач. Здесь имеются две возможности: локомоторное и манипуляционное познавание (второе происходит при формировании инструментальных навыков). В первом случае животное изменяет свое пространственное отношение к среде без того, чтобы сама среда изменилась. Если же в окружающей животное среде что-то изменяется в результате изменения поведения животного, то речь идет уже о манипуляторной активности животного. В исследованиях, произведенных вместе с И. Баркоци, Кардош показал, что с большим трудом можно крысу научить выбирать в одном и том же лабиринте разные пути, приводящие к одной точке, а затем двигаться дальше различным образом, например прямо или в сторону (рис. 16). Это пример локомоторного познавания. Но, согласно Кардошу, нельзя обучить животное (за исключением, возможно, человекообразных обезьян) тому, что в зависимости от выбора того или иного пути передвижения «случается то или нечто другое», т. е. произойдут изменения в окружающей среде (в экспериментах пища подменялась другим подкреплением — водой). Человек же, как пишет Кардош, «удивился бы, найдя в одном и том же месте разные предметы, когда он подходил справа и слева, но он обучился бы после первого же опыта. Развитие именно здесь делает скачок… Человек полностью может освободиться от направляющего воздействия пространственного порядка, если временно-причинные связи требуют другого».[37]
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
25. Аутоиммунные процессы
25. Аутоиммунные процессы Аутоиммунные процессы – это такие состояния, при которых происходит выработка аутоантител (или накопление клона сенсибилизированных лимфоцитов к антигенам собственных тканей организма).Когда аутоиммунные механизмы вызывают нарушение
3. Аутоиммунные процессы
3. Аутоиммунные процессы Аутоиммунные процессы – это такие состояния, при которых происходит выработка аутоантител (или накопление клона сенсибилизированных лимфоцитов к антигенам собственных тканей организма).Когда аутоиммунные механизмы вызывают нарушение
7. ВЫРАБОТКА ДВИГАТЕЛЬНЫХ НАВЫКОВ
7. ВЫРАБОТКА ДВИГАТЕЛЬНЫХ НАВЫКОВ Совершенствование двигательной функции в онтогенезе происходит как за счёт продолжающегося в первые годы после рождения созревания врождённых механизмов, участвующих в координации движений, так и в результате научения, т.е.
2.7. Системные процессы
2.7. Системные процессы В качестве ключевых положений рефлекторной теории П.К. Анохин выделял следующие:1. исключительность пускового стимула как фактора, детерминирующего действие, которое является его причиной;2. завершение поведенческого акта рефлекторным действием,
Воспаление десен и воспалительные процессы полости рта
Воспаление десен и воспалительные процессы полости рта Особенности наблюдения и лечения при гингивите и воспалительных процессах полости ртаГингивит развивается медленно и постепенно, в течение нескольких месяцев и даже лет, поэтому на быстрое его излечение
4.4. Вероятностные процессы в биологическом морфогенезе
4.4. Вероятностные процессы в биологическом морфогенезе Есть множество примеров физических процессов, имеющих вероятностные пространственные результаты. В общем случае изменения, включающие нарушения симметрии или гомогенности, являются неопределенными; примеры
Основные особенности навыков
Основные особенности навыков Навык — центральная, важнейшая форма факультативного научения. Иногда термин «навык» употребляется для обозначения научения вообще. Однако, как подчеркивает А. Н. Леонтьев, нельзя называть навыками любые связи, возникающие в
Познавательные аспекты раннего постнатального поведения
Познавательные аспекты раннего постнатального поведения Исследовательское поведение Постоянной составной частью любого поведенческого акта является исследовательское поведение, проявляющееся на разных онто- и филогенетических уровнях в весьма различных формах.
Экзогенные процессы
Экзогенные процессы На формирование поверхности Земли большое влияние оказывает выветривание. Оно обусловлено многими причинами. Выветривание представляет собой дробление пород под воздействием колебания температур. Каждая порода состоит из одного, двух или
Эндогенные процессы
Эндогенные процессы В земной коре и в настоящее время происходят значительные изменения. Наблюдаются колебания земной коры, движение отдельных участков суши в горизонтальном направлении (Калифорнийское побережье передвигается на север, Баварские Альпы — в сторону
Глава 7 Биогеохимические процессы и продукционные циклы
Глава 7 Биогеохимические процессы и продукционные циклы 7.1. Общие положения Как отмечалось выше, биомасса живых организмов (любого систематического уровня) характеризует один из аспектов биосферы. Зная ее величину, можно составить представление о количестве изъятых из
11.1. Виды космических воздействий на земные процессы
11.1. Виды космических воздействий на земные процессы Известно, что природные и экологические факторы, влияющие на динамику биосистем, представлены сложным набором параметров. В свою очередь, каждый из этих факторов (температура, влажность, количество осадков и т. д.)
Некоторые этапы интеграции в формировании поведения животных[32]
Некоторые этапы интеграции в формировании поведения животных[32] Крупнейшим событием в изучении физиологии нервной системы за последние десятилетия явились установленные Павловым и его школой закономерности высшей нервной деятельности, лежащие в основе поведения
8. Генетические процессы в эволюции расовых различий в IQ
8. Генетические процессы в эволюции расовых различий в IQ Следует полагать, что за развитие расовых различий в интеллекте ответственны два генетических процесса. Первый из них состоит в том, что между расами развились следующие различия в частотах аллелей высокого и